MINISUMO
ÀMBIT D'APLICACIÓ DELS ROBOTS DE MINISUMO.

La construcció d'un robot de minisumo es pot proposar com a treball de recerca als alumnes de batxillerat. També es podria proposar de construir a la matèria d'electrotècnia, que a partir del proper any es farà a segon curs de Batxillerat, 4 hores a la setmana. I per descomptat als cicleformatius d'electrònica.
TEMPORITZACIÓ.
El temps que es requereix per construir un robot de minisumo depèn molt de la complexitat d'aquest i de la destresa de l'alumne, però a grans trets com a mínim serien unes 45 hores desglossades tal com s'indica a continuació:
-Disseny xassís (4h).
-Soldar la placa (3h).
-Construcció del xassís (20h).
-Acoplar sensors i motors (5h).
-Pensar i fer el programa (6h).
-Proves dels sensors i motors (1h).
-Prova del comportament del robot en la pista sol (3h).
-Prova del robot amb un adversari (3h).
PREU D'UN ROBOT DE MINISUMO
El preu d'un robot de minisumo pot oscíl·lar entre els 35 i 100€, tot dependrà del manterial que s'utilitzi per a la seva construcció. El més econòmic és utilitzar plàstic per fer el xassís, el motors que siguin servos modificats comprats a Conrad, els sensors comprats a Junum (veure Enllaços d'interés) i utilitzar portapiles AA o AAA.
CARACTERÍSTIQUES DELS ROBOTS DE MINISUMO

Els robots de minisumo són robots que no poden passar dels 10 cm de costat, ni dels 500 gr de pes i han de ser totalment autònoms.

A més han de disposar d'uns sensors d'infrarroigs i/o d'ultrasons per a localitzar a l'adversari i fer-lo fora de la pista (Dohyo) i d'uns altres d'infrarroigs, generalment CNY70, per evitar sortir-se de la pista.

La pista on competeixen els robots de minisumo ha de ser llisa, de color negre mate, de 77 cm de diàmetre, amb una franja blanca al voltant d'uns 2,5 cm i ha d'estar elevada sobre el terra uns 3cm.

L'objectiu d'aquests robots consisteix en localitzar l'adversari i empenye'l fins fer-lo fora de la pista de combat.
Es considera guanyador d'un combat de minisumo, al robot millor de tres assalts. Cal dir que els assalts no poden durar més de tres minuts. Si durant 30 segons els robots queden engantxats es considera l'assalt com a nul. Si en voleu saber més coses podeu consultar l'apartat de normativa.
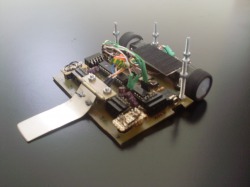
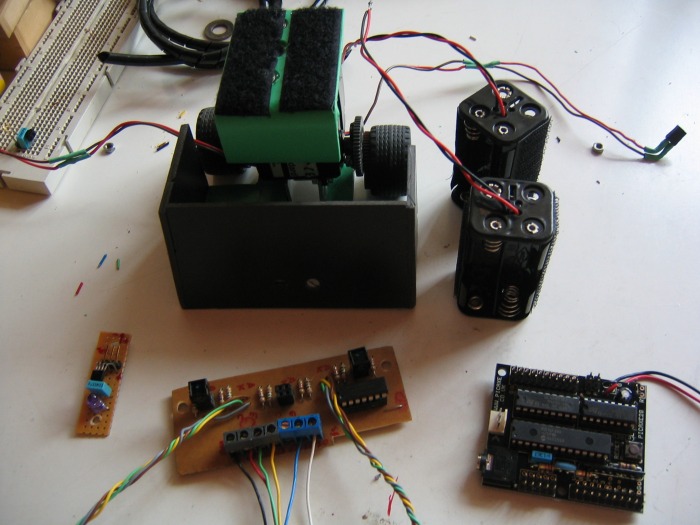
ROBOT MINISUMO MODEL MS-1
Es tracta d'un robot construït amb PVC de baixa densitat, disposa de dos servomotors modificats i d'engranatges que multipliquen la velocitat 3 vegades, tarja comercial picaxe 28x, tarja de sensors de creació pròpia, alimentació amb 8 piles AA recarregables, tracció 2x2, rodes de joguina de playmobil,...


PCB de la placa dels sensors CNY70.
Es pot obrir amb el programa PCAD-2004 TRIAL.
| placasensors2.pcb |
Programa de control del robot MS-1
El podeu obrir i editar amb qualsevol editor de text. Per volcar-lo al microcontrolador hi ha disponible el Programing Editor que es pot descarregar gratuïtament de la pàgnina web de PICAXE:
http://www.rev-ed.co.uk/picaxe/
| minisumo_ms1.bas |
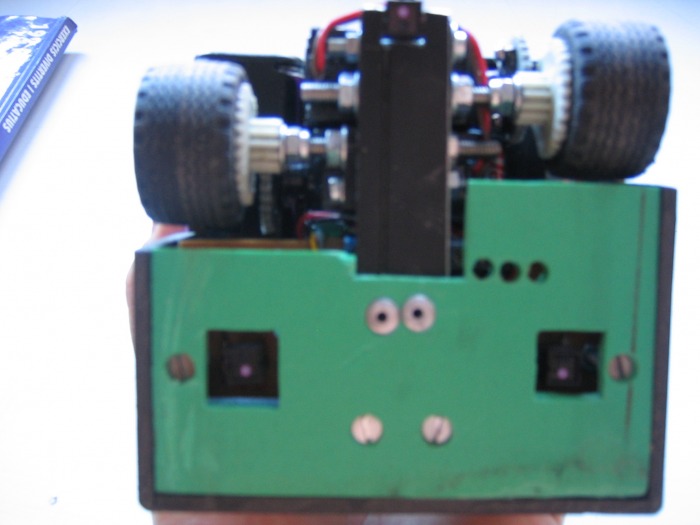
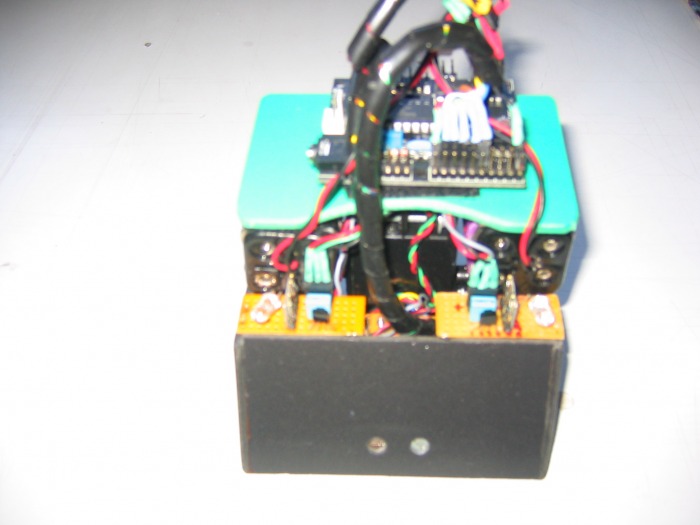
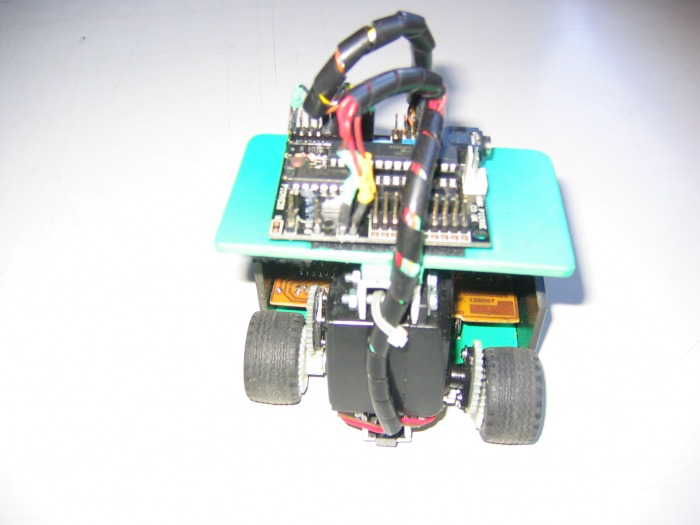
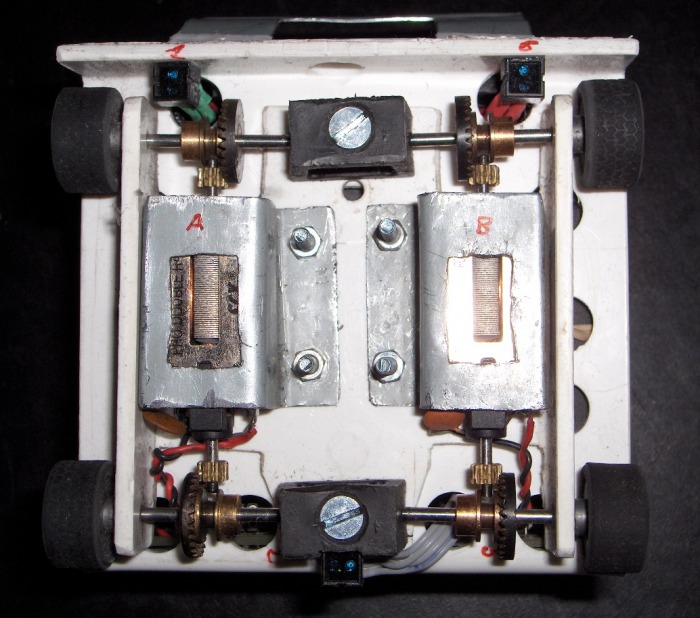
ROBOT MINISUMO MODEL MS-2
Robot construït amb polietilè i PVC nergre de baixa densitat, disposa de dos motors d'escalestric 4x4, tarja picaxe28x IES GARROTXA modificada, alimentació 14 piles AAA recarregables (17V) , potència màx 50W, consum 3A, tracció 4x4, llantes i gomes d'escalestric racing,...


Llistat de material del robot MS-2.
El següent arxiu està en format excel per tal de que es pugui modificar, com per exemple posar-hi preus quantitats,...
Cadascun dels components electrònics disposa d'un link on es pot comprar més econòmicament.
| materials_robot_sumo.xls |
Programes de control en llenguatge basic.
Els podeu obrir i editar amb qualsevol editor de text. Per volcar-lo al microcontrolador hi ha disponible el Programing Editor que es pot descarregar gratuïtament de la pàgnina web de PICAXE:
http://www.rev-ed.co.uk/picaxe/
| test_entrades_minisumo_scal.bas |
| minisumo__motors_scalestrix_v6.bas |
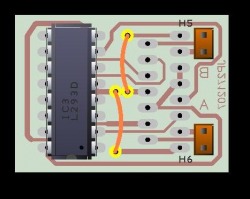
PCBs de la placa picaxe28 i del PCB adaptador del driver de motors.
Es pot obrir amb el programa PCAD-2004 TRIAL.
Cal dir que per comanar els motors d'escalestrix del driver de motors l293d no té prou potència i cal posar-hi una petita placa que adapti els pins del l293d al l298n.
| picaxesumo4.pcb |
| adaptadorl293d_a_l298n_amb_real_pcb.pcb |
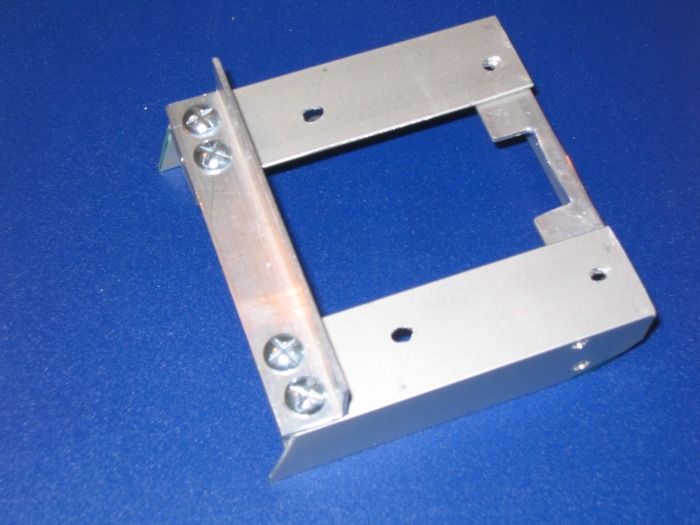
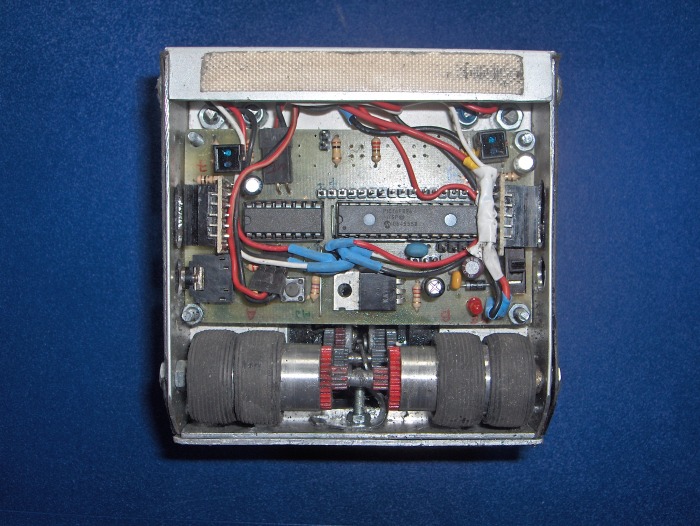
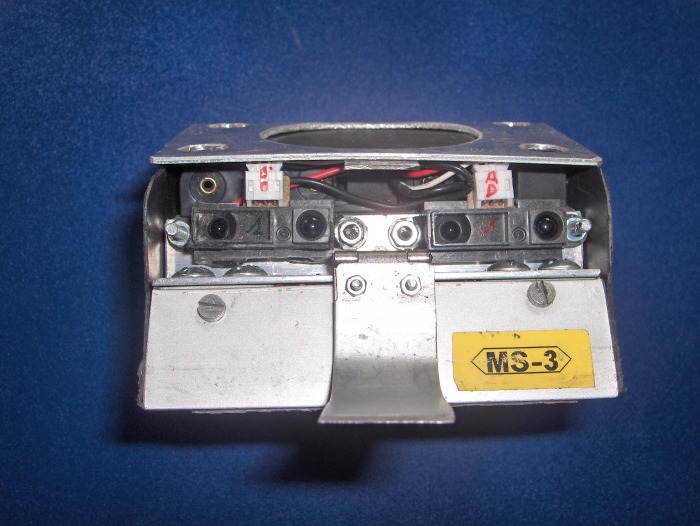
ROBOT MINISUMO MODEL MS-3

Xassís d'alumini, per tracció disposa de dos servomotors modificats amb engranatges que multipliquen la velocitat 5 vegades, tarja picaxe28x de disseny propi que integra els sensors de línia i els laterals, potència màx 20W, consum 2,5A, tracció 2x4, alimentació amb 7 piles AAA, les llantes són cilíndres d'alumini tornejats que permeten doble goma a cada costat,...




Llistat de material de MS-3.
El següent arxiu està en format excel per tal de que es pugui modificar, com per exemple posar-hi preus quantitats, ...
Cadascun dels components electrònics disposa d'un link on es pot comprar més econòmicament.
| materials_robot_sumo5_v1.xls |
Tutorial sobre com s'ha de modificar un servo per tal que pugui donar tota la volta i convertir-lo en un motoreductor.
http://www.instructables.com/id/How-to-modify-a-servo-motor-for-continuous-rotatio/
PCB de la placa de control. La placa és autoconstruïda.
Es pot obrir amb el programa PCAD-2004 TRIAL.
| picaxesumo5.pcb |
Programes de control del robot MS-3.
Els podeu obrir i editar amb qualsevol editor de text. Per volcar-lo al microcontrolador hi ha disponible el Programing Editor que es pot descarregar gratuïtament de la pàgnina web de PICAXE:
http://www.rev-ed.co.uk/picaxe/
| test_entrades_ms3.bas |
| minisumo_ms3_v301.bas |
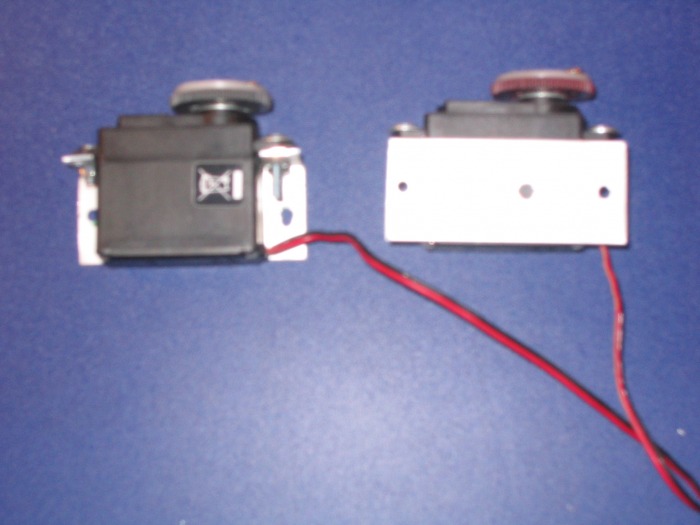
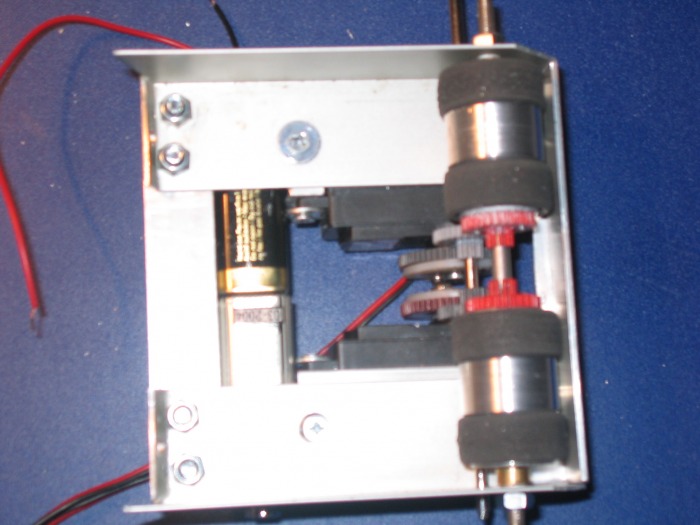
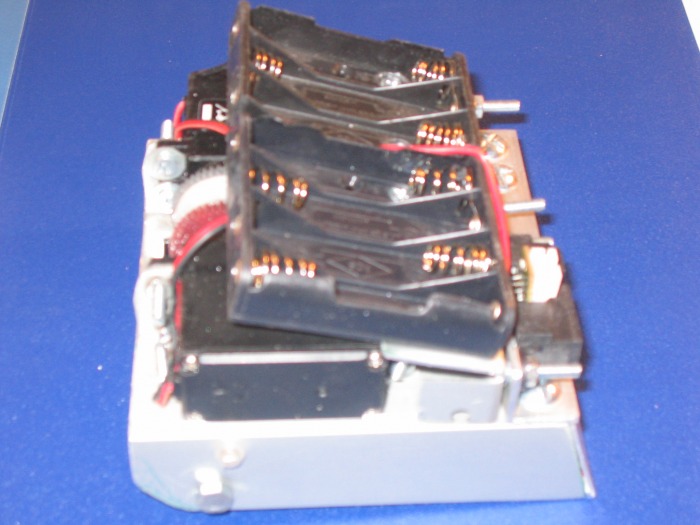
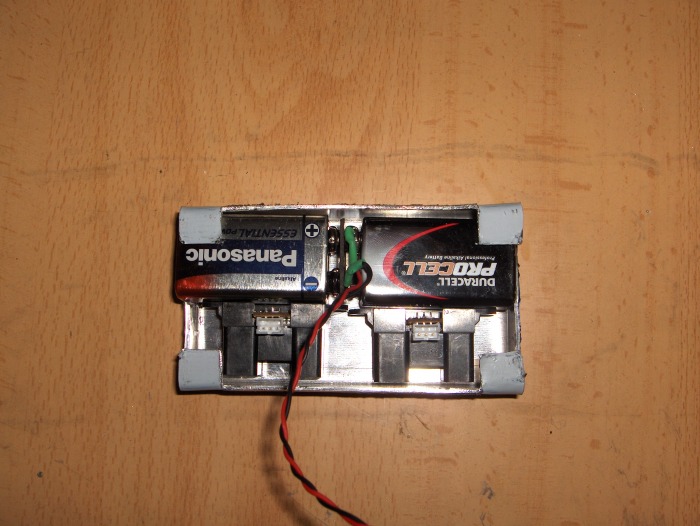
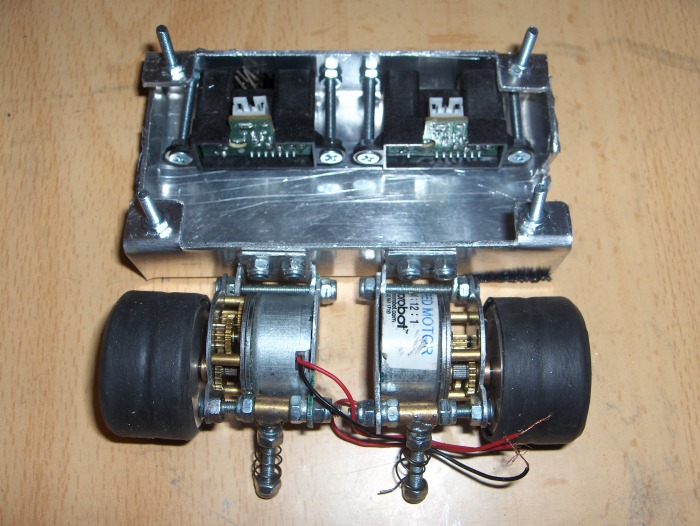
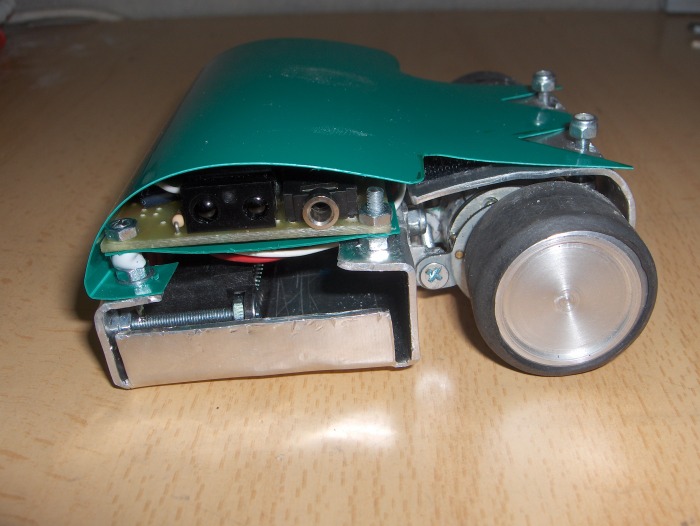
ROBOT MINISUMO MODEL MS-4
Xassís d'alumini, els motors són del tipus solar amb reductor 12:1 d'engranatges metal·lics, tarja picaxe28x de disseny propi que integra els sensors de línia i els laterals, potència màx 24W , consum 2A, alimentació 8 piles AAA de 1,2V recarregables (9,6V), tracció 2x4, lles llantes són cilindres d'alumini tornejats que permeten doble goma d'escalestric a cada costat,...


Llistat de material.
El següent arxiu està en format excel per tal de que es pugui modificar, com per exemple posar-hi preus quantitats,...
Cadascun dels components electrònics disposa d'un link on es pot comprar més econòmicament.
| materials_robot_sumo6.xls |
Esquema de la placa electrònica.
L'esquema està fet amb el programa eagle. L'arxiu està guardat en pdf.
| esquema_minisumo6_eagle.pdf |
| p-cad_pistes_minisumo6.pdf |
| p-cad_ubicaci_components_minisumo6.pdf |
PCB de la placa de control. La placa és autoconstruïda.
Es pot obrir amb el programa PCAD-2004 TRIAL.
| picaxesumo6_cny70_per_sota.pcb |
Programes de control del robot MS-4.
Els podeu obrir i editar amb qualsevol editor de text. Per volcar-lo al microcontrolador hi ha disponible el Programing Editor que es pot descarregar gratuïtament de la pàgnina web de PICAXE:
http://www.rev-ed.co.uk/picaxe/
El programa de funcionament del robot segons els motors i les piles que s'utilitzin farà que el robot no funcioni com cal. Per això és important començar per un programa més senzill que faci voltar el robot per la pista sense sortir-ne i després incorporar la part de detecció de l'adversari. Si els motors corren molt el robot es fa molt difícil de controlar i cal fer-los treballar per pulsos. Una manera fàcil de fer-los treballar per impulsos consisteix en activar-los durant un breu instant i desactivar-los durant un altre instant amb les instruccions forward i halt.
| test_entrades_ms4.bas |
ROBOT DE MINISUMO MS-5

ROBOT DE MINISUMO MS-6