RASTREJADORS DIRECCIONALS
Els robots rastrejadors direccionals tenen per objectiu realitzar el seguiment d'una línia, generalment blanca sobre fons negre. Aquest seguiment es realitza mitjançant un microcontrolador que controla la posició del servo encarregat de la direcció del robot, en funció de la informació que rep dels sensors CN70. També és usual utilitzar algun tipus de control de la tracció per tal d'accelerar el robot a les rectes i reduir-ne la velocitat a les corbes.
ROBOT RASTREJADOR DIRECCIONAL MODEL RD-1
Aquest model es va construir durant el curs ICE 2006/07.

| tutorial_construcci_robot_articulat_11cd.pdf |
| planols_robot_articulat_11cds.rar |
Programa de control RD-1.
Aquest robot està controlat amb el micro 89420, encara que també es podria controlar amb la tarja picaxe 28x i carregant el programa del model RD-2.
| iceserv8nou2.hex |
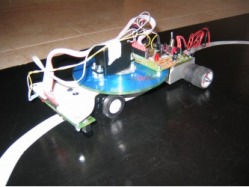
ROBOT RASTREJADOR DIRECCIONAL MODEL RD-2
Aquest model és el model base que han construït els alumnes a l'optativa d'electrònica de batxillerat del curs 2007/08. El model bàsic no disposa de control de tracció. Posteriorment s'ha modificat el programa per tal de disminuir la velocitat als revolts i augmentar-la a les rectes.

Plànols robot RD-2.
Les peces dels plànols següents es poden fer de polietilè o PVC de baixa densitat.
| planol_n1_peces1_i_2_del_robot_articulat.pdf |
| planol_n2_peces_3_i_4_del_robot_articulat.pdf |
Diagrama de flux del programa de control del robot rastrejador RD-2.
Aquest diagrama permet entendre millor el programa de control del robot.
| diagrama_de_flux_robot_articulat.pdf |
Esquema electrònic del circuit imprès.
Aquest és l'esquema de la placa electrònica del picaxe 28x de l'IES LA GARROTXA. També es pot utilitzar per construir robots de minisumo.
| esquema_robot_sumo.pdf |
Llistat de material model RD-2.
Hi ha disponible el llistat de material per construir aquest model de robot. També inclou les adreces electròniques dels proveïdors on s'ha comprat el material.
Programes de control del robot RD-2.
Hi ha un programa per testejar les entrades per assegurar que no falli cap sensor. Dels dos que hi ha a continuació un és de velocitat fixa i l'altra varia la velocitat segons els revolts.
| prova_entrades.bas |
| rastrejador_batx_1.bas |
| rastrejador_batx_velocitat_variable.bas |
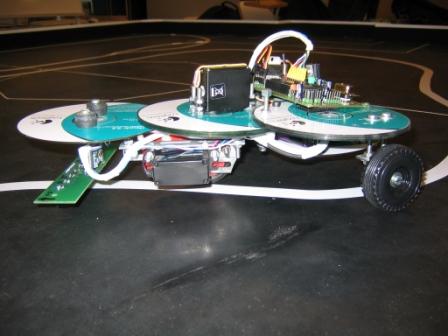
ROBOT RASTREJADOR DIRECCIONAL MODEL RD-3
Model construït durant el curs ICE 2007/08. Disposa de control de velocitat. El control es realitza amb la placa PICAXE_08M de l'IES LA GARROTXA. Disposa de dos sensors cny70.
La direcció es governa amb un servo i la tracció es realitza amb un motoreductor solar. El xassís està fet amb PVC de baixa densitat. S'alimenta amb 8 piles AA.
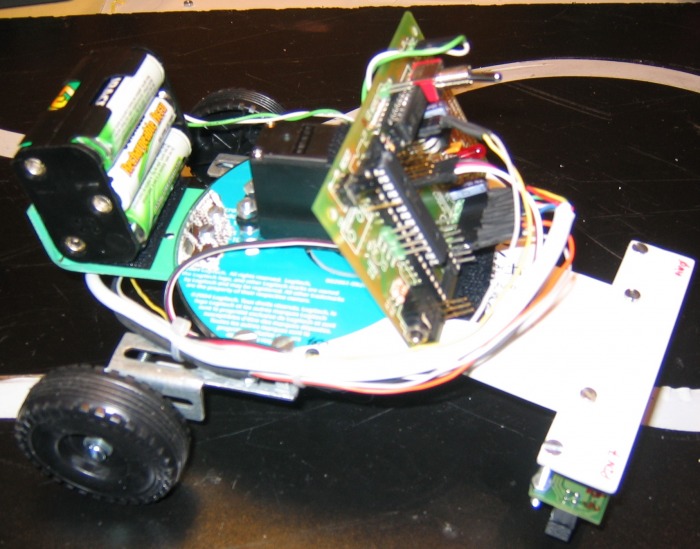
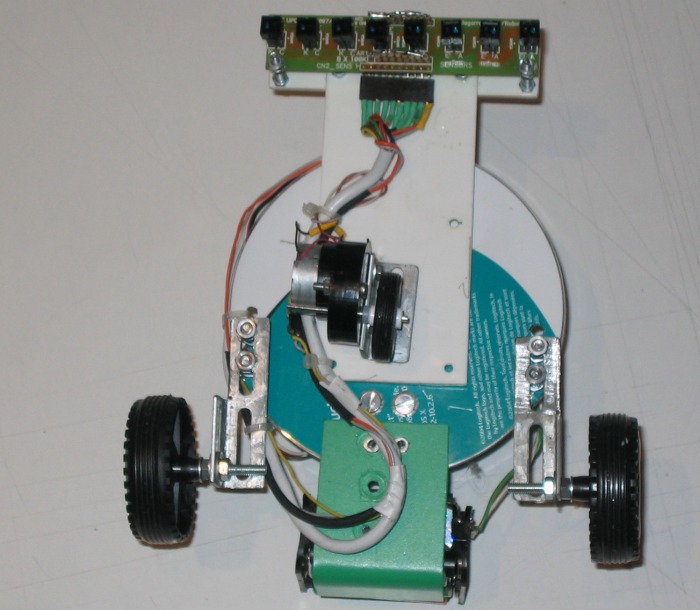
ROBOT RASTREJADOR DIRECCIONAL MODEL RD-4
Model construït com a banc de proves per tal d'accel·lerar la velocitat. Es van fer proves amb direcció al davant i al darrera amb un sol servomotor però es va descartar perquè el robot oscil·lava molt. Finalment només es controla la direcció de la roda de tracció davantera i la velocitat de tracció.